Pose and Shape Estimation of a Soft, Multi-Stable Robot for Search and Rescue Using Internal Vision-Based Sensing
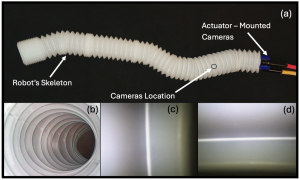
In this work, we present a vision-based proprioception framework for a multi-stable soft robot equipped with embedded monocular cameras. Leveraging the robot’s geometric structure, which naturally forms ellipse-like features, our method extracts both positional and directional information using robust image processing and geometric analysis techniques.
Relevant publication:
- Initial Work
An Automated System for Projection of Interior Construction Layouts

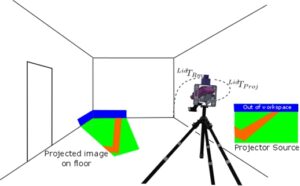
Layout of the interior works during building construction is time-consuming and error-prone. Given the cost involved, both for initial layout and for later rework where errors occur, researchers have sought to automate the layout task. Some have adopted marker-less augmented reality (AR) methods using heads-up displays or cameras, and others have proposed robots capable of marking out the works. The former encumber the workers, the latter are expensive to set up and are sensitive to site conditions, and neither has yet achieved the required accuracy. In this work, we propose a more efficient approach to project relevant information from a Building Information Model (BIM) onto the construction surface, directly augmenting the construction site with the design information. This is done using a portable system consisting of a 2D laser scanner, an angled adjustable projector, and a camera. The system localizes itself within the already built outer walls using the laser scanner and the BIM model using a method derived from robotic mapping; it calibrates the projection correction parameters (keystone correction) using image analysis; and it projects the information with the angled projector. Testing results showed that the localization was accurate within a few millimeters and less than three degrees, and the final projected image’s error was approximately one centimeter. Initial calibration requires less than one minute and does not require specialist skills. The system automates the layout task, preserves accuracy, and can provide rich model information on any interior surface.
Relevant publication:
- An Automated System for Projection of Interior Construction Layouts.
Amir Degani, Wen Bo Li, Rafael Sacks, and Ling MA, IEEE Transactions on Automation Science and Engineering,doi:10.1109/TASE.2019.2897135, 2019.
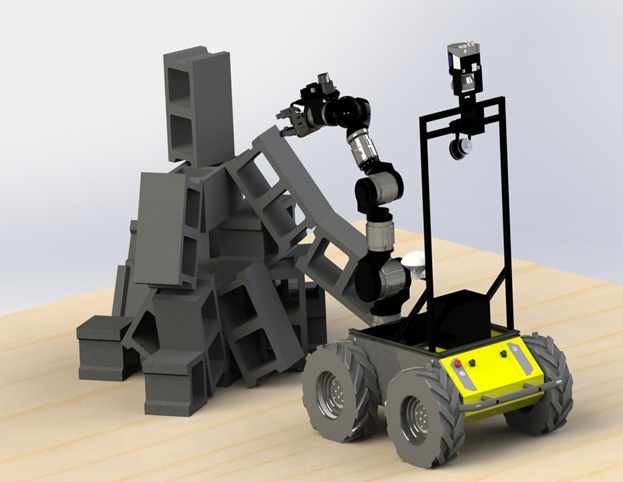
Safe Robotic Disassembling of Randomly Piled Objects
We propose to examine a manipulation task in Urban Search and Rescue (USAR) where there is a need to disassemble a pile of objects in order to allow the robot to continue its path, or to evacuate a victim. Such scenarios require taking into consideration pile disturbances in order to keep the safety of the survivors, the USAR teams, or the safety of the site’s environment. This work compares four decision-making algorithms (DMAs) for the autonomous pile disassembling process. The DMA must decide which single block should be removed. The Volume Height Algorithm (VHA) removes the object with the highest potential energy; the Filtered Volume Height Algorithm (FVHA) removes the object with the highest potential energy that does not support any other objects from below; the Kinematic Based Algorithm (KBA) decides to remove the least encapsulated object; and lastly, the Filtered Volume Height Kinematic Based Algorithm (FVHKBA) is a combination of FVHA and KBA. All algorithms were simulated and analysed under full knowledge conditions and the more realistic, partial knowledge conditions. In partial knowledge mode, the algorithm processes the knowledge of only the objects which can be seen from outside viewing points. Additionally, the effect of the pile homogeneity was examined by disassembling piles of identical blocks and of different sized blocks. The FVHA shows the most impressive performances regardless of knowledge conditions and pile homogeneity.
Relevant publication:
Decision Making Algorithms for Safe Robotic Disassembling of Randomly Piled Objects.
Sharon Temtsin and Amir Degani, Special Issue on Advanced Manipulation, Advanced Robotics, doi:10.1080/01691864.2017.1352537, 2017. (link).