Feasibility Study of a Granular Jamming Gripper for Robotic Fruit Harvesting
This research explores the feasibility of using a granular jamming gripper for robotic fruit harvesting. A granular jamming gripper consists of a flexible membrane filled with granular material. Initially, the granules are in a fluid-like state, allowing the gripper to conform to the shape of the object. When air is evacuated from the gripper’s cavity, the granules jam and transition into a rigid structure, enabling the gripper to securely hold objects of varying shapes. The project involves the design and prototyping of such a gripper, experimental characterization of its gripping forces, and analytical modeling of the grasping process. The study highlights the potential and limitations of granular jamming technology as a flexible and adaptive solution for agricultural automation.

Methods for Simultaneous Orchard and Harvesting Robot Design
Robotic manipulators can perform a variety of agricultural tasks. However, despite decades of research, few agricultural robots have been commercialized. One of the reasons for the lack of agricultural robots on the market today is their high cost, which makes them unprofitable for farmers.
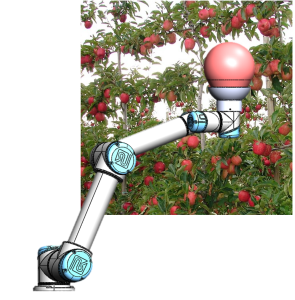
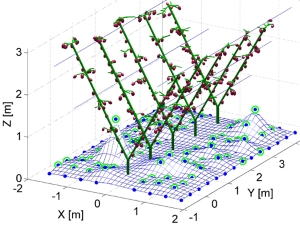
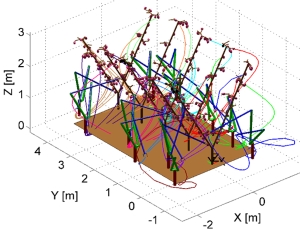
To decrease the cost of robot manipulators for agriculture by improving the robot performance, we propose designing a robot that is optimal for a specific task. In the optimization process, the robot’s performance is maximized keeping the ability of the robot to perform the task. To achieve a reliable result, the actual field task must be described and modeled with sufficient precision. However, the complex and unstructured environment of agricultural tasks complicates the task description as well as the robot-design process.
The main goal of this research is to develop methods for simultaneous design of orchard and harvesting robot. The orchard is the geometrical environment of the agricultural tasks, and its influence and interaction with the task-based robot optimal design was analyzed. This analysis allows to simplify the task description by characterizing the environment during the simultaneous design of the robot and its environment.
Relevant publication:
- A Methodology of Orchard Architecture Design for an Optimal Harvesting Robot. Victor Bloch, Amir Degani, and Avital Bechar, Biosystems Engineering, 166:126-137, doi:10.1016/j.biosystemseng.2017.11.006, 2018 (link).
- Development of an Environment Characterization Methodology for Optimal Design of an Agricultural Robot. Victor Bloch, Avital Bechar, and Amir Degani, Industrial Robot, 44(1), doi: 10.1108/IR-03-2016-0113, 2017 (link, PDF).
- Task characterization and classification for robotic manipulator optimal design in precision agriculture. Victor Bloch (Chernishev), Avital Bechar, and Amir Degani, Proc. of the 10th European Conference on Precision Agriculture (ECPA), Bet Dagan, Israel, July 2015.
Modular Agriculture Task-Based Robot


In this work, we suggest a new approach to design an optimal, modular re-configurable agriculture manipulator. The definition of a modular robot is that it comprises of a number of basic modules. These modules can be changed, replaced and reordered at any needed configuration. Moreover, we suggest that the joints be made of the same basic parts, so the length of the joints can also be easily adjusted as needed. Installation angles, e.g. angles between different joints can be also changed during the re-configuration. Below we separate two types of modularity: with or without changing the joints order. In both types, length and installation angles changes are allowed.
Relevant publication:
Design of a Task-Based Modular Re-Configurable Agricultural Robot. Mark Levinand Amir Degani, Proc. of the 5th IFAC Conference on Sensing, Control and Automation for Agriculture (AgriControl 2016), Seattle, WA, Aug., 2016
Air-Ground collaboration
Aerial Tree scanning
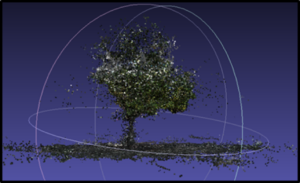
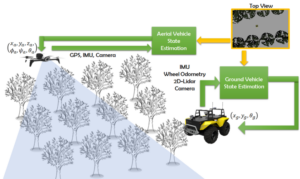
An important task in precision agriculture is yield monitoring and estimation. In orchards, conclusions can be drawn based on the tree’s shape: canopy volume, trunk diameter, etc. For estimating those parameters and more, a 3D scan of a tree can be very helpful. Aerial vehicles are suitable for this task thanks to their ability to cover a tree from every orientation and at different altitudes. The control of the vehicle and the stitching of a 3D pointcloud present interesting challenges. We have implemented 3D Slam using RTAB using our Bebop2 with a pc and Realsense on top of the aerial vehicle.
Reinforcement Learning for Autonomous Vehicle Navigation in Unknown Rough Terrain
Reinforcement learning is an exciting area of machine learning which takes artificial intelligence to the next level.
Currently, off-road navigation typically classifies obstacles in a binary way of traversable or non-traversable which requires human labeling and can reduce the utilization of off-road vehicles.
We aim to harness the power of deep neural networks in order to navigate off-road vehicle in rough terrain without human supervision.
Through interaction with the environment the reinforcement learning algorithm learns a policy that maps the robot’s state and observation to an action

Autonomous Stretcher

As the off-road autonomous vehicle, we use the Clearphath Grizzly 4X4 skid steering vehicle controlled by the open-sourced Robotic Operating System (ROS) and integrated with a high accuracy dGPS, stereo camera on top of a pan-tilt unit, Sick 2D laser scanner and a custom built shock absorber system for the stretcher.
Past Projects
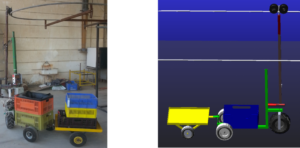
Vehicle Steering Using an Overhead Guide in Greenhouse Tasks
We have developed an autonomous vehicle steering control algorithm to aid with harvesting and spraying tasks in greenhouses to alleviate the problem of shortage of workers. We use an overhead guide constructed in the greenhouse to mark the desired path of the vehicle. A rigid bar is then connected from the guide to the vehicle. The vehicle steers and corrects itself by sensing the angle and distance of the vehicle from the guide. The control algorithm was developed for a two-dimensional kinematic vehicle model which was found to be valid for low-speed vehicles. The steering control was examined by numerical simulation in order to investigate the effects of parameters such as control-point location on stability deviations of the vehicle path. The asymptotic stability of the system was verified analytically and confirmed using numerical simulations. The control system was then simulated using a multibody dynamics simulation in conditions that better simulated an agricultural environment, thus confirming that the control system also maintained stability under rough conditions. Finally, in accordance with the control algorithm and the simulations, a proof-of-concept prototype of the vehicle was developed and the control algorithm was successfully deployed on a set of experiments.
Relevant publication:
Vehicle Steering Using an Overhead Guide. Gilad Gat, Samuel Gan-Mor, Amir Degani, Computers and Electronics in Agriculture, Computers and Electronics in Agriculture, 121:234 – 244, doi:10.1016/j.compag.2015.12.019, 2016 (link)
Automatic Herding

Relevant publication:
Automatic Herding Reduces Labour and Increases Milking Frequency in Robotic Milking. Uri Drach, Ilan Halachmi, Tal Pnini, Ido Izhaki, and Amir Degani, Biosystems Engineering, 2017 (link).