Safe Robotic Disassembling of Randomly Piled Objects
We propose to examine a manipulation task in Urban Search and Rescue (USAR) where there is a need to disassemble a pile of objects in order to allow the robot to continue its path, or to evacuate a victim. Such scenarios require taking into consideration pile disturbances in order to keep the safety of the survivors, the USAR teams, or the safety of the site’s environment. This work compares four decision-making algorithms (DMAs) for the autonomous pile disassembling process. The DMA must decide which single block should be removed. The Volume Height Algorithm (VHA) removes the object with the highest potential energy; the Filtered Volume Height Algorithm (FVHA) removes the object with the highest potential energy that does not support any other objects from below; the Kinematic Based Algorithm (KBA) decides to remove the least encapsulated object; and lastly, the Filtered Volume Height Kinematic Based Algorithm (FVHKBA) is a combination of FVHA and KBA. All algorithms were simulated and analysed under full knowledge conditions and the more realistic, partial knowledge conditions. In partial knowledge mode, the algorithm processes the knowledge of only the objects which can be seen from outside viewing points. Additionally, the effect of the pile homogeneity was examined by disassembling piles of identical blocks and of different sized blocks. The FVHA shows the most impressive performances regardless of knowledge conditions and pile homogeneity.

Relevant publication:
Decision Making Algorithms for Safe Robotic Disassembling of Randomly Piled Objects.
Sharon Temtsin and Amir Degani, Special Issue on Advanced Manipulation, Advanced Robotics, doi:10.1080/01691864.2017.1352537, 2017. (link).
Automatic Herding

The motivation of cows to be milked is a key factor in the utilisation of milking robots. If a cow does not voluntarily attend a robot stall, fetching, that requires expensive labour, is required. This research suggests a new concept, herding all the cows to the milking robot using an automatic herding system (AHS). An AHS was built as a system of slow moving mobile fences controlled by an industrial controller. The AHS herds all the cows to the milking robot. The AHS was used in a commercial farm with two milking robots, and the experiment was conducted for three months. The dairy herd was divided into a reference group (43 cows) and an experimental group (38 cows). The AHS was used only with the experiment group. Milking frequency increased in the experimental group by 45.5% (1.89 milkings d−1 vs. 2.75 milkings d−1), while there was no major change in the milking frequency in the reference group 0.4% (2.38 milkings d−1 vs. 2.39 milkings d−1). Milk yield increased in the experiment group 15.7% (35.65 kg d−1 vs. 41.25 kg d−1). There was also no major change in the milk yield in reference group 4% (31 kg d−1 vs. 29.76 kg d−1). There was an 80% decrease in labour time for fetching the cows to the milking robot in the experimental group (5 h day−1 vs. 1 h day−1) while there was no change in labour for the reference group. The AHS was therefore associated with higher milking frequency, higher milk yield and labour reduction, hence economic benefits are expected for the system.
Relevant publication:
Automatic Herding Reduces Labour and Increases Milking Frequency in Robotic Milking.
Uri Drach, Ilan Halachmi, Tal Pnini, Ido Izhaki, and Amir Degani, Biosystems Engineering, 2017 (link).
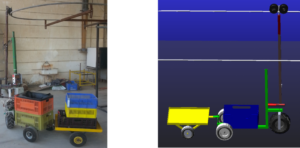
Vehicle Steering Using an Overhead Guide in Greenhouse Tasks
We have developed an autonomous vehicle steering control algorithm to aid with harvesting and spraying tasks in greenhouses to alleviate the problem of shortage of workers. We use an overhead guide constructed in the greenhouse to mark the desired path of the vehicle. A rigid bar is then connected from the guide to the vehicle. The vehicle steers and corrects itself by sensing the angle and distance of the vehicle from the guide. The control algorithm was developed for a two-dimensional kinematic vehicle model which was found to be valid for low-speed vehicles. The steering control was examined by numerical simulation in order to investigate the effects of parameters such as control-point location on stability deviations of the vehicle path. The asymptotic stability of the system was verified analytically and confirmed using numerical simulations. The control system was then simulated using a multibody dynamics simulation in conditions that better simulated an agricultural environment, thus confirming that the control system also maintained stability under rough conditions. Finally, in accordance with the control algorithm and the simulations, a proof-of-concept prototype of the vehicle was developed and the control algorithm was successfully deployed on a set of experiments.
Relevant publication:
Vehicle Steering Using an Overhead Guide.
Gilad Gat, Samuel Gan-Mor, Amir Degani, Computers and Electronics in Agriculture, Computers and Electronics in Agriculture, 121:234 – 244, doi:10.1016/j.compag.2015.12.019, 2016 (link).
Even Older Past Projects
Mechanics in Gait Asymmetry: Is asymmetry in walking useful? Collaboration with R. Gregg, Y. Dhaher and K. Lynch (Northwestern University).
HARP – Highly Articulated Robotic Probe: Miniature snake for cardiac surgery. Collaboration with Howie Choset, Alon Wolf, Brett Zubiate, Stephen Tully, and more. This has spun off into MedRobotics
Duality Between Maxwell Theory and Singularities in Parallel Manipulators. Collaboration with Alon Wolf.
Knee Bio-Mechanics (collaboration with Alon Wolf)
Pre-Operative Knee Kinematics Modeling
Knee pathology classification