Dynamic legged locomotion
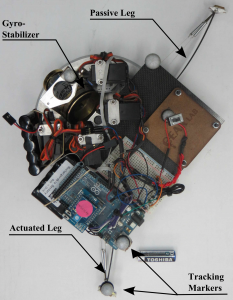
The Parkourbot is a highly dynamic legged robot, mimicking the parkouring movement of humans. It uses two bow shaped legs to propel itself from side to side, moving upward on a flat air table. The Parkourbot uses two servo-motors for each leg, controlling the leg angle and leg tension. On impact, the energy stored in the leg is released and a special clutch disengages the leg so the leg angle is determined by the dynamics of the Parkourbot’s dynamics. To maintain its orientation, the Parkourbot uses a gyro in the upper part of its body. To perform hopping and running tests, the Parkourbot can use only one leg.

Relevant publication:
- Shemer, N., & Degani, A. (2017). A flight-phase terrain following control strategy for stable and robust hopping of a one-legged robot under large terrain variations. Bioinspiration & Biomimetics.
- Gaathon, A. & Degani, A. (2016). ADAPTIVE SWING LEG RETRACTION CONTROL FOR ROBUST DYNAMIC LOCOMOTION UNDER LARGE TERRAIN VARIATIONS. In Advances in Cooperative Robotics: Proceedings of the 19th International Conference on Clawar 2016 (p. 369). World Scientific.
- Shemer, N., & Degani, A. (2014, September). Analytical control parameters of the swing leg retraction method using an instantaneous slip model. In Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on (pp. 4065-4070). IEEE.
- Degani, A., Long, A. W., Feng, S., Brown, H. B., Gregg, R. D., Choset, H., … & Lynch, K. M. (2014). Design and open-loop control of the ParkourBot, a dynamic climbing robot. IEEE Transactions on Robotics, 30(3), 705-718.
- Long, A., Degani, A., & Lynch, K. (2012). Feedback control experiments with the ParkourBot. In Adaptive Mobile Robotics (pp. 409-416).
- Degani, A., Feng, S., Brown, H. B., Lynch, K. M., Choset, H., & Mason, M. T. (2011, May). The parkourbot-a dynamic bowleg climbing robot. In Robotics and Automation (ICRA), 2011 IEEE International Conference on (pp. 795-801). IEEE.
- Long, A. W., Gregg, R. D., & Lynch, K. M. (2011, September). The simplest parkour model: Experimental validation and stability analysis. In 14th Int. Conf. Climbing Walking Robots, Paris, France.
Minimalistic Control Strategies for Damped and Undamped SLIP-based Dynamic Running Robots
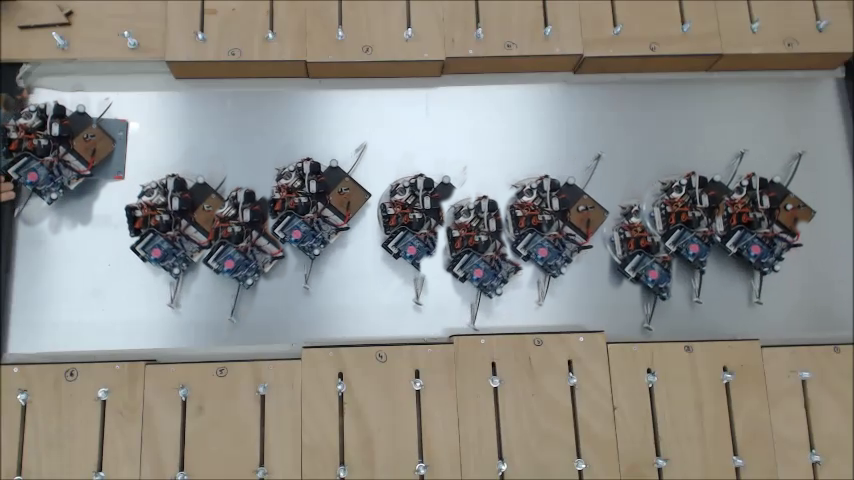
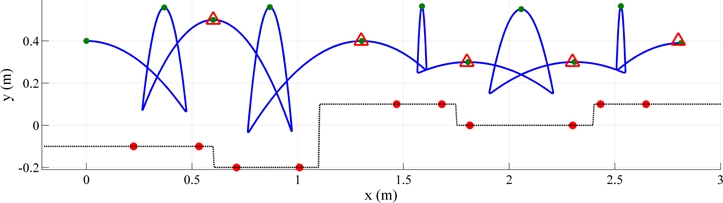
This work demonstrates a simple, once per step, flight-phase control method for robots running on a planar unknown rough-terrain environment. The robot used to exemplify these control strategies is the ParkourBot, a Spring Loaded Inverted Pendulum (SLIP)-based robot. The SLIP model is widely used for the description of humans and animals running motion and has been the basis for many robots. A known control scheme for increasing robustness of the conservative, SLIP model is the Swing Leg Retraction (SLR) method. Despite of the SLR’s popularity, it is not intended to be used on the more realistic, nonconservative damped SLIP model. On the damped SLIP model, the SLR controller failed to provide adequate results, therefore, we have derived a new simple, flight-phase control method called Polynomial Energy Insertion (PEI). The new PEI method is based on the deadbeat solution of the damped simplified instantaneous SLIP (iSLIP) model, which assumes an infinitely stiff spring. Unlike the SLR which, starting from apex, changes the leg angle monotonically during flight, the PEI requires the leg length (hence, energy insertion) to change monotonically throughout the flight phase. Interestingly, the leg angle remains nearly constant. In simulations and experiments, we have compared the newly developed PEI to the previous SLR method. We have found that since the SLR does not control the horizontal velocity, it looses its stability under rough terrain. The PEI method was able to control the horizontal velocity and height from ground and hence showed great improvement in robustness to rough terrain. Moreover, in both simulations and experiments the PEI methods showed an increase in the mean jumps to failure of more than 30% compared to SLR-based controllers.
Relevant publication:
- Shemer, N., & Degani, A. (2017). A flight-phase terrain following control strategy for stable and robust hopping of a one-legged robot under large terrain variations. Bioinspiration & Biomimetics.
- Shemer, N., & Degani, A. (2014, September). Analytical control parameters of the swing leg retraction method using an instantaneous slip model. In Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on (pp. 4065-4070). IEEE.
Improving Stability and Reaching Absolute Destinations for the Conservative SLIP Model
This work demonstrates a simple, once per step, flight-phase control method for robots running on a planar unknown rough-terrain environment. The robot used to exemplify these control strategies is the ParkourBot, a Spring Loaded Inverted Pendulum (SLIP)-based robot. The SLIP model is widely used for the description of humans and animals running motion and has been the basis for many robots. A known control scheme for increasing robustness of the conservative, SLIP model is the Swing Leg Retraction (SLR) method. Despite of the SLR’s popularity, it is not intended to be used on the more realistic, nonconservative damped SLIP model. On the damped SLIP model, the SLR controller failed to provide adequate results, therefore, we have derived a new simple, flight-phase control method called Polynomial Energy Insertion (PEI). The new PEI method is based on the deadbeat solution of the damped simplified instantaneous SLIP (iSLIP) model, which assumes an infinitely stiff spring. Unlike the SLR which, starting from apex, changes the leg angle monotonically during flight, the PEI requires the leg length (hence, energy insertion) to change monotonically throughout the flight phase. Interestingly, the leg angle remains nearly constant. In simulations and experiments, we have compared the newly developed PEI to the previous SLR method. We have found that since the SLR does not control the horizontal velocity, it looses its stability under rough terrain. The PEI method was able to control the horizontal velocity and height from ground and hence showed great improvement in robustness to rough terrain. Moreover, in both simulations and experiments the PEI methods showed an increase in the mean jumps to failure of more than 30% compared to SLR-based controllers.
Relevant publication:
- Gaathon, A. & Degani, A. (2016). ADAPTIVE SWING LEG RETRACTION CONTROL FOR ROBUST DYNAMIC LOCOMOTION UNDER LARGE TERRAIN VARIATIONS. In Advances in Cooperative Robotics: Proceedings of the 19th International Conference on Clawar 2016 (p. 369). World Scientific.
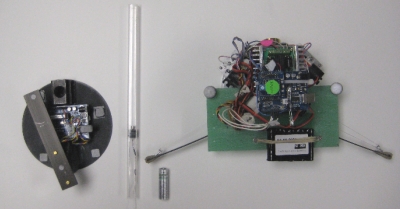
Single Acuated Swimming Robot
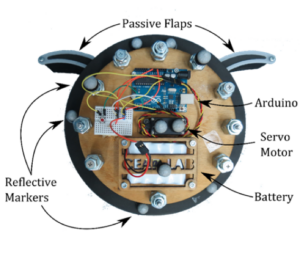
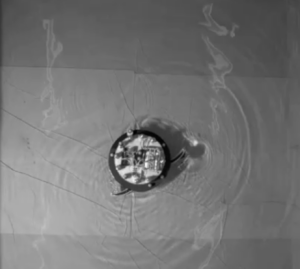
In this research, we propose a simple and minimalistic mechanism which later could be used as an agent in a robotic swarm. The mechanism is capable of locomoting in a two dimensional environment using only a single motor and two passive flaps. The mechanism comprises two concentric bodies, with their centers connected by a servo motor. As the motor turns, the bodies rotate in opposite directions and in rates relative to the ratio of their moments of inertia. Two passive flaps are connected to the outer body and their angle of rotation is mechanically limited. As the outer body rotates, the drag force on the flap causes it to open. When the flap reaches its mechanical limitation, the force which the water exerts on the flap causes the robot to move forward. Then, the motor rotates in the opposite direction, the currently open flap closes and the closed flap opens which causes a similar motion in the opposite direction. By inputting an oscillatory motion, the robot moves forward in a repetitive manner. In effect, the mechanism uses the drag force of the water to create an asymmetry which allows the forward motion. We have discovered that despite the robot having a single motor, by inserting an asymmetrical input to the motor, the robot performs a turning motion, i.e., its average orientation is changing. Furthermore, by inserting inputs with different asymmetries, the robot can turn in various radii. Using these two basic gaits, the robot is able to locomote through the entire plane.
Relevant publication:
- A Single-Actuated Swimming Robot: Design, Modelling, and Experiments. Gilad Refael and Amir Degani, Journal of Intelligent & Robotic Systems, doi:10.1007/s10846-018-0776-x, 2018 (link).
- Momentum-Driven Single-Actuated Swimming Robot (JTCF Novel Technology Paper Award).Gilad Refael and Amir Degani, Proc. of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 2015.
- Design and Modeling of a Minimalistic Robotic Swimmer, Gilad Refael (Cum Laude), MSc. Thesis, 2016. Thesis Page.
Past Projects
Minimalistic Dynamic Climbing Robots
Dynamics in locomotion is highly useful, as can be seen in animals and is becoming apparent in robots. For instance, chimpanzees are dynamic climbers that can reach virtually any part of a tree and even move to neighboring trees, while sloths are quasistatic climbers confined only to a few branches. Although dynamic maneuvers are undoubtedly beneficial, only a few engineered systems use them, most of which locomote horizontally. This is because the design and control are often extremely complicated. This thesis explores a family of textit{dynamic climbing} robots which extend robotic dynamic legged locomotion from horizontal motions such as walking, hopping, and running, to vertical motions such as leaping maneuvers. The motion of these dynamic robots resembles the motion of an athlete jumping and climbing inside a chute. Whereas this environment might be an unnavigable obstacle for a slow, quasistatic climber, it is an invaluable source of reaction forces for a dynamic climber. The mechanisms described here achieve dynamic, vertical motions while retaining simplicity in design and control. The first mechanism called DSAC, for Dynamic Single Actuated Climber, comprises only two links connected by a single oscillating actuator. This simple, open-loop oscillation, propels the robot stably between two vertical walls. By rotating the axis of revolution of the single actuator by 90 degrees, we also developed a simpler robot that can be easily miniaturized and can be used to climb inside tubes. The DTAR, for Dynamic Tube Ascending Robot, uses a single continuously rotating motor, unlike the oscillating DSAC motor. This continuous rotation even further simplifies and enables the miniaturization of the robot to enable robust climbing inside small tubes. The last mechanism explored in this thesis is the ParkourBot, which sacrifices some of the simplicity shown in the first two mechanism in favor of efficiency and more versatile climbing. This mechanism comprises two efficient springy legs connected to a body. We use this family of dynamic climbers to explore a minimalist approach to locomotion. We first analyze the open-loop stability characteristics of all three mechanisms. We show how an open-loop, sensorless control, such as the fixed oscillation of the DSAC’s leg can converge to a stable orbit. We also show that a change in the mechanism’s parameters not only changes the stability of the system but also changes the climbing pattern from a symmetric climb to a limping, non-symmetric climb. Corresponding analyses are presented for the DTAR and ParkourBot mechanisms. We finally show how the open-loop behavior can be used to traverse more complex terrains by incrementally adding feedback. We are able to achieve climbing inside a chute with wall width changes without the need for precise and fast sensing and control.
Relevant publication
- Dynamic Single Actuator Robot Climbing a Chute. Period Doubling Bifurcations: Analysis and Experiments.
Amir Degani, , Meccanica, 51(5): 1227–1243, doi: DOI 10.1007/s11012-015-0286-x, 2016. (link) - Design and Open-Loop Control of the ParkourBot, a Dynamic Climbing Robot.
Amir Degani, Andrew W. Long, Siyuan Feng, H. Ben Brown, Robert D. Gregg, Howie Choset, Matthew T. Mason, and Kevin M. Lynch, IEEE Transactions on Robotics, 30(3), 705 – 718, 2014 (IEEE PDF). - DTAR – a Dynamic, Tube Ascending Robot. Amir Degani, Howie Choset and Matthew T. Mason, IEEE Transactions on Robotics, 27(2): 360–364, 2011
- A Dynamic Single Actuator Vertical Climbing Robot. Amir Degani, Amir Shapiro, Howie Choset and Matthew T. Mason, Proc. 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 29 – Nov 2, 2007, Sheraton Hotel, San Diego, CA, USA – PDF
- Minimalistic, Dynamic, Tube Climbing Robot – Video Submission (Best Video Award) .
Amir Degani, Siyuan Feng, Howie Choset and Matthew T. Mason, Proc. of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, 2010 - The ParkourBot – A Dynamic BowLeg Climbing Robot. Amir Degani, Siyuan Feng, H. Benjamin Brown, Kevin M. Lynch, Howie Choset and Matthew T. Mason, Proc. of the 2011 IEEE International Conference on Robotics and Automation (ICRA 2011). IEEE LINK
- Feedback Control Experiments with the ParkourBot. Andrew Long, Amir Degani, and Kevin M. Lynch, in International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR), Baltimore, MD, 2012.
- Minimalistic Dynamic Climbing, Amir Degani, PhD Thesis, CMU-RI-TR-10-38, Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, November, 2010. Thesis Page
Mechanics in Gait Asymmetry
Collaboration with R. Gregg, Y. Dhaher and K. Lynch (Northwestern University).
This word uses two symmetrical models, the passive compass-gait biped and a five-link 3-D biped, to computationally investigate the cause and function of gait asymmetry. We show that for a range of slope angles during passive 2-D walking and mass distributions during controlled 3-D walking, these models have asymmetric walking patterns between the left and right legs due to the phenomenon of spontaneous symmetry-breaking. In both cases a stable asymmetric family of gaits emerges from a symmetric family of gaits as the total energy increases (e.g., fast speeds). The ground reaction forces of each leg reflect different roles, roughly corresponding to support, propulsion, and motion control as proposed by the hypothesis of functional asymmetry in able-bodied human walking. These results suggest that body mechanics, independent of neurophysiological mechanisms such as leg dominance, may contribute to able-bodied gait asymmetry.
Relevant publication:
- On the Mechanics of Functional Asymmetry in Bipedal Walking.
Robert D. Gregg, Yasin Dhaher, Amir Degani, and Kevin M. Lynch, IEEE Transactions on Biomedical Engineering, 59(5): 1310 – 1318, 2012. (PDF) - The Basic Mechanics of Bipedal Walking Lead to Asymmetric Behavior.
Robert D. Gregg, Amir Degani, Yasin Dhaher, and Kevin M. Lynch, Proc. of the 2011 IEEE International Conference on Rehabilitation Robotics (ICORR). IEEE LINK